一种改进watershedbased SAR图像分割算法
在本节中,我们给出另一种方法是基于分水岭算法的图像分割因为有时我们需要保持边界等信息。分水岭算法是一个完善的形态学分割工具,它通常段图像为一组非重叠区域。分水岭算法的优势区域增长算法,在区域空间上一致,形成一个封闭的边界,连接设置,它还利用边缘信息,被表面梯度。这种数学形态学分割方法分别认为光与暗的图像区域图像的山丘和山谷的风景。段给定图像“景观”泛滥,即水流从高海拔地区(高灰度值的地区)的最陡下降,直到达到一些地区最低(低灰度区域)。图像的流域或流域盆地区域的排水区域最小值。这些区域由线称为分水岭线。
不幸的是,分割产生的天真的应用分水岭算法通常不足:图像通常算法大量极小的区域。结果,提出了几种扩展以产生更多的自然图像分割(如层次流域或地区分裂/合并[14])。最常见的方法是使用标记来识别相关区域最小值(例如,[15],[16]和[17])。通过设置标记位置作为唯一的分水岭图像中的局部最小值,可以自动控制区域的数量。此外,特定的方法来发现和利用标记可以在[18],[19]和[20],研究人员使用朴素贝叶斯分类器来识别(即。分类)像素组内部标记。当然,这些特定的控制过分割方法具有良好的性能,但他们是复杂的、低速度。所以我们展示一种改进的分水岭算法指的是,在论文[17]。其标记提取方法是本文的重点之一。分水岭分割并不是有效的合成孔径雷达(SAR)图像相干散斑噪声,一般损坏的图像通常是算法分成大量的微小区域由于散斑噪声往往会被放大的梯度算子。涉及到高斯滤波器来平滑图像在许多在我们的算法步骤。大津算法用于产生内在的标志和外部标志。这是无监督、低复杂性和高速度。然后我们使用马克修改SAR图像的梯度图像。此外,而不是洪水梯度图像,我们使用梯度图像修改的标记作为分水岭算法的输入。首先,我们提供高斯滤波器的简要概述。接下来,我们提出我们的算法的细节。以下部分介绍实验结果进行一系列的SAR图像和讨论结果的重要性。最后一部分提出了未来的研究方向,总结了纸。
高斯滤波器[21][22]一直集中在图像处理和计算机视觉进行研究。这是一种变换在频域处理频率直接相关变化率,不难直观地把傅里叶变换的频率和强度的变化图像的模式。这是最慢的不同频率分量(u = v = 0)对应于图像的平均灰度。当我们远离原点的变换,低频率对应于图像的慢变分量而高频率对应的细节,如噪音。一个过滤器时减弱高频”通过“低频率被称为低通滤波器。一个过滤器,相反的特点是适当地称为高通滤波器。我们希望lowpass-filtered图像比原始大幅减少细节,因为高频衰减。同样,highpass-filtered图像在平滑区域和灰度变化少的强调过渡灰度细节。这样的图像会出现尖锐。
本文之前高斯低通滤波器用于抑制噪声提取梯度图像。所以也会减少区域最小值梯度图像。这是一个很好的帮助控制过分割。它由以下步骤[23]:(1)输入图像乘以(1)+ y中心变换;(2)计算F (u, v),图像的DFT; (3) F (u, v)乘以过滤函数H (u, v)(4)计算结果的逆DFT (3);(5)获得的结果的实部(4)(6)(5)的结果乘以(1)+ y的傅里叶变换高斯低通滤波后的输出图像可以表示为:
G (u, v) = H (u, v) F (u, v), H (u, v) = exp (- (M2 + v2) / 2 a2)
大津算法可以说是自适应计算单一阈值(用于将图像转换为灰度图像)的简单有效的方法。算法的输入灰度图像直方图直方图的分析分为两个部分,该方法在许多情况下实现最优阈值。使用最优分割阈值,我们SAR图像分割成目标和背景的类。在本文中,我们从梯度提取标记分水岭分割图像的算法。
大津算法的最小二乘原则。首先,它的基本原理是计算类的每个灰度值的方差,然后分割图像根据灰度值最大类方差值。假设图像的像素数目是M,灰度值的范围是[1,L],像素灰度值的数量我是mi,相应的概率是π= mi / M C0报价吧和C1作为目标和背景类分别除以k值。C0的灰度值范围是1 k, C1的灰度值范围是[k + 1, L]。的灰度值概率C0
k L
)0 = ^π,C1的灰度值概率是®1 = ^π。为了评估最优我= 1 = k + 1分割阈值,我们将介绍以下判别标准措施(或类可分性的措施)用于判别。
分析。让aW aj和在类方差,类之间的方差和总方差分别为水平。
2 2 2 l = aB在„K = = aB
aw aw在
有啊=®0 a0 +®1 a12, aB =®oC”o) 2 +®1 (^ 1) 2 = 0®®1 (^ 0 ^ 1) 2
L 1 '太. .= ^ T太
=毫升=年代iPi & = Z iPi ' = - fh =
最大化的最佳分割阈值n,或者说最大化< 7 b
分水岭算法最初是由Lantuejoul[25],广泛被描述的许多应用程序一起Beucher和梅尔[26]。由于原来的开发与灰度图像[25]已经扩展到计算有效形式(使用FIFO队列)[27]和[28]应用于彩色图像。分水岭方法的主要优势在其他之前开发的分割方法[26]:
•生成的边界形成封闭和连接区域。传统的基于边缘技术最经常断开连接的边界需要后处理形式产生封闭的地区。
•结果区域的界限总是对应于图像中出现的轮廓明显的物体轮廓。这与第一个分裂分裂和合并方法通常是一个简单的正则切片图像的主要有时不稳定的结果。
•所有区域的联盟形成整个图像区域。
直接应用分水岭分割算法导致overs-egmentation由于噪声和其他当地梯度的违规行为。切实解决此问题是限制允许的区域的数量,通过融合一个预处理阶段旨在给分割过程带来额外的知识。这些方法是有效的标记需要对象。
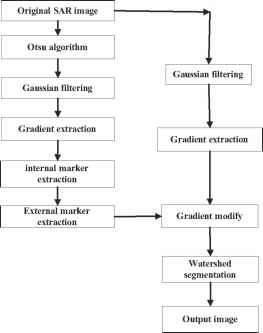
而不是直接使用图像,使用梯度图像进行分水岭变换从原始图像中提取。因此初期的分水岭分割方法产生一个梯度图像与实际图像。所以我们需要提取原始图像的梯度图像“priwitt”操作符。Soille使用形态学重建的算法使用标记来修改它所以它只有区域最小值时内部形象和外部形象是零。标记是一个连接组件属于一个映像。在这篇文章中,有两种类型的标记,一个内部外部标记,标记和基于标记的分水岭是转置标记选择问题。摘要内部标记是在这种情况下,定义为(1)点包围的区域更高的“高度”;(2)这样的点在该地区形成一个连接组件;和(3)中所有的点在该地区形成一个连接组件具有相同的灰度值。然而,Soille的SAR图像分割算法是无用的,相干散斑噪声和纹理信息也导致过分割。所以我们提出改进算法。 To obtain fewer internal markers , Firstly, we segment the SAR image using Otsu method. Smoothing the initial segmentation by Gaussian filter is also necessary, because it can reduce small regions which will produce redundant markers. Secondly, we obtain the gradient of the segmentation by gradient operator and we smooth it again using low pass filter to emphasize the significant gradient within the image and reduce the gradient caused by coherent speckle noise or other minor structures, such as texture in SAR images. Thirdly, we select internal marker from the smoothed gradient image. Selecting internal marker is to find regional minima in the gradient image, regional minima are connected components of pixels with a constant intensity value, and whose external boundary pixels all have a higher value. The value is called fall threshold. The higher fall threshold, the fewer the number of region. One marker per region is necessary since there will be a one-to-one correspondence between the marker and segments of the final partition. The external markers are the watershed of internal marker image which effectively partition the image into regions, with each region containing a single internal marker. At last, we obtain the gradient of original SAR image by gradient operator, the gradient image is modified by internal marker and external marker. The watershed algorithm applied to the modified gradient. The markers controlled the number of regions, and the original gradient image insures that the boundaries of segmentation result are accurate. The program in detail is shown in Fig 1.
继续阅读:[k l g j g j Cj [k l
这篇文章有用吗?