色散关系
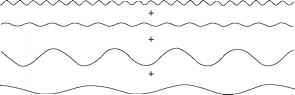
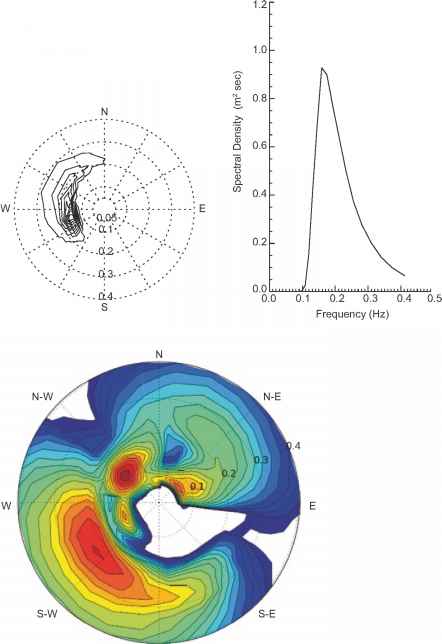
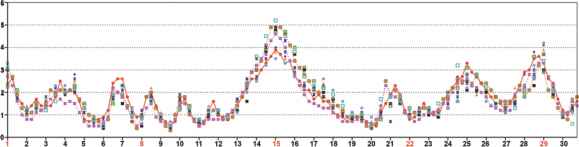
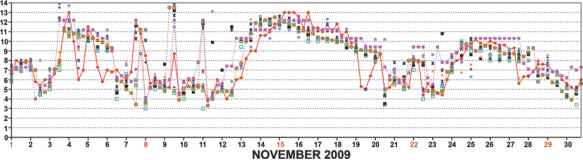
将 这是色散关系(所谓的原因,后面会讲清楚)。现在可以推导出运动的许多有用的性质。我们将首先考察深水波浪和浅水波浪之间的区别。 深水波被定义为水的深度比波的波长大的波。我们可以认为波长是波数的倒数(由于我们处理的是数量级,所以去掉了2n的因子),因此深水被定义为kH»1 (8.17) 我们现在考虑在这种情况下色散关系会发生什么变化。查看图8.3,我们看到对于较大的x, tanh x渐近于1,这意味着对于较大的kH, tanh kH趋于1,色散关系减小到m2 = gk (8.18) 另一方面,浅水波是波长比水深长,即k»H,因此kH«1 (8.19) 再一次,我们考虑tanh x的行为,这次是小x,看到它接近直线y=x。对于小的kH, tanh kH趋于kH,色散关系减小为 一个有趣的问题是“深水有多深?”或“浅水有多浅?”考虑一下我们对深水所作的近似,即。 深水变得“深”的那一点就是我们宣称这个近似是正确的那一点,所以它实际上取决于你想沿着渐近线走多远。看一下y=tanh x的图,就会发现,当x = 2时,tanh已经非常接近1,事实上,tanh(2.0) = 0.96这个4%的因素很可能是“足够小”的,所以如果我们把这个作为近似值保持的点,那么深水可以定义为kH > 2。这意味着要应用深水近似,水深需要大于波长的三分之一左右。海洋中典型的波浪周期约为8秒,波长约为100米,因此将考虑这些深水波一直到30米左右的深度,也就是说,只有在水深小于30米时,波浪才会开始触底。由于全球波浪预报模型具有典型的粗空间分辨率(见第8.5节),很少有网格点位于30米或30米以下的深度,因此仅使用深水物理运行全球系统通常是一种合理的方法。 现在考虑浅水近似,我们看到当x的值小于0.5时,y=tanh x非常接近they=x线,实际上tanh(0.45)«0.422。同样,如果我们认为这是一个可容忍的近似,那么我们可以说,当kH < 0.45时,我们的浅水近似成立,或者 换句话说,要使波表现为纯粹的浅水波,水深需要小于波长的7%。因此,当水深小于7米时,我们的100米长的膨胀波才会变成纯粹的浅水波。最重要的是,在浅水中波长变短,将浅水膨胀的深水波长100米的限制移动到更浅的水域。 这里需要注意的一点是,“深水”和“浅水”的定义实际上是海浪和水深之间的关系,而不是水深的绝对值,因此没有具体的深度可以被称为“深”或“浅”。例如,海啸的波长与地震破裂的宽度有关地震这就产生了它。它通常有100千米宽。因此,当水深不到7000米(100公里)的7%时,海啸就会起到浅水波的作用。几乎全球所有的海洋都比这个浅,所以这就是为什么要考虑海啸肤浅水波。 8.3.1相速度和群速度 从浅水和深水色散关系的近似可以很容易地推导出波传播的一些有趣的特征。波的相位速度就是波峰的传播速度。波的周期(T)的定义是波的连续波峰通过一个固定点所花费的时间,因此波将在时间T内移动距离X,因此相速度(cp)为 对于由许多不同的正弦波表示的扰动,群速度描述了波群能量传播的速度。这可以被证明是(例如Holthuijsen 2007;年轻的1999) ^ = / !和^=为浅水时(式8.20): Cp = -JgH, Cg = JgH (8.27) 式(8.26)表明,在深水中,单个波浪的传播速度是它们所携带能量的两倍。这是一个有趣的概念,在自然界中很容易看到。如果你把一块小石头扔进水坑,只要水坑够深,你就会看到一组涟漪沿着深度向外扩散水分散关系。当涟漪从扰动中传播出去时,你会看到单个波出现在群的后面,在群中向前移动,然后在到达群的前面时消失。由式(8.26)可知,波的传播速度与波数有关,因此不同波长的波的传播速度也不同。对于由许多不同频率(或波长)的波组成的扰动,当它们从扰动区域传播出去时,较长的波将比较短的波传播得更快,因此波的能量将会分散。这就是术语色散关系的由来。 式(8.27)表明,在浅水中,单个波的传播速度与波能相同,而这个速度只与水深有关。因此,所有波长的波都以相同的速度传播,浅水波因此是非色散的。 除了波传播的这些有趣的特征外,从式(8.14)中还可以得到进一步有用的运动性质。例如,可以表明,流体颗粒的轨迹(由u和w定义)在深水中描述圆形,在浅水中描述椭圆。这些通常被称为波的轨道速度。这里没有给出推导,但可以在Young (1999), Holthuijsen(2007)或Kundu(1990)中找到细节。 上面的分析主要是考虑一个正弦波分量的非常简单的情况。我们已经看到,可以推导出一些现成的东西海洋的特征但是,很明显,这不是对实际海洋表面的有效描述。更合适的描述是,海面的特征是大量正弦分量的叠加,这些正弦分量中的每一个都表现为前一节所描述的。图8.4显示了一个有五个正弦分量的例子。这些组成部分中的每一个都有不同的频率和不同的振幅,它们加在一起就产生了底部所描绘的更复杂的海面高度。这仍然是一维的,但它可以很容易地扩展到二维,通过考虑一系列不同的波方向。 因此,海面高度一般可以用 i=i,其中ai、Mi、fa分别表示第i个波分量的幅值、频率和相位。 图8.4一维海洋表面5个正弦分量之和的表示 考虑海面高度的变化。根据定义,这是地表高程平方的平均值,因此,假设n的平均值为零: 方差= a2 = - a2 (8.29) 我们还可以考虑方差如何在波场中出现的不同频率上分布,即在频率区间Aft上分布。这就给出了方差密度谱: j2af变成了极限 这是频谱。它可以推广到方向情况为 综上所述,方向频谱F (F, 0)可以用来描述海面高程的变异性。需要注意的是,该描述中没有相位信息,因此图8.4所示的实际地表高程不能从频谱中重建出来,而是根据波的频率和方向描述了能量在波场中的分布。 波浪谱是一个非常有用的构造,是当前最先进技术的预测变量波模型.方向波谱的几个例子如图8.5所示。 该图的顶部面板显示了一个完整的方向波动频谱和它的方向积分一维等效。这描述了一个相对简单的海况,其中大部分波能是向西传播,在这个方向上有相当大的分布。峰值能量出现在大约0.15 Hz的频率,即大部分能量被周期约为6.7秒的波携带(这是峰值周期,Tp)。对于下图所示的频谱 图8.5方向波谱示例 图8.5方向波谱面板示例,海况有许多不同的分量,波能明显地向多个不同的方向传播。你可以想象,用这幅波谱描述的海况看起来会非常复杂,而且与上面面板的波谱所代表的波场非常不同。 有效波高(H)是另一个经常用于描述海况的非常重要的概念。对于简单正弦波,波高的概念是微不足道的——波高被定义为振幅的两倍,因此对于图8.4中所描述的5个波分量中的每一个,确定波高是很简单的。但是得到的波场的波高是多少? Hs已经被用来描述许多不同的“波高”,这些“波高”可以从波场中推导出来。它们的值通常都非常接近,但由于它们的推导方法不同,因此有一些细微的差异是必须了解的。 最初的定义是基于视觉观察。在公海上乘船的人可以观察海浪,并估计出“平均”浪高是多少。显然,这将是一个主观估计,不同的观察者可能会得出不同的波高估计。这被称为有效波高。 第二个定义是通过直接观测海面高度得到的。在这种情况下,有效波高被定义为样本中三分之一最高的波的平均值,其中“波”是通过向上或向下交叉定义的(例如,见Holthuijsen(2007)关于这些定义)。在这种情况下,所得到的波高应该更准确地称为H1/3,但更常用的是显著波高。已经证明,目测到的波高与波高的定义密切相关(Jardine 1979)。这意味着观察者只看到较高的波,而自动忽略了在主波上的较小的波。 Hs也可以从波谱中推导出来。使用定义,即它是给定记录中最高的三分之一的波的平均值,并假设波高(或更具体地说,波峰高)是瑞利分布的,那么H133可以被证明等于(Holthuijsen 2007): 其中m0是给出的波谱的零阶矩 这相当于二维光谱所包围的体积(一维版本将是一维光谱曲线下的面积)。4.004的值…通常四舍五入为4,因此H1/3的光谱推导定义,更正式地应该称为Hm0,可以写成 同样的,这通常被称为Hs。为了从模拟的波动频谱中确定这一点,积分需要表示为模拟频谱的离散频率和方向范围的和。考虑到模型的频率范围有限,它可以解决,通常包括高频尾巴,f-n斜坡,其中n是通常4或5,所以它是容易确定下面的面积频谱的一部分,它可以被添加到h .(见图8.5中的一维谱——光谱值突然停止的最高频率模型能够解决)。 显著波高是波高的一种统计度量。很明显,单个的波可以高也可以低。可以表明,在描述单个相干波系统的简单频谱中,单个波高度的概率分布密切遵循瑞利分布(例如,Holthuijsen 2007)。这一分布表明,100个波中预计有1个波的强度达到1.51 Hm0, 1000个波中预计有1个波的强度达到1.86Hm0。更高的波浪变得不太可能,这就是为什么高于约2.0Hm0的波浪通常被称为“畸形”或“异常”波浪。 我们在这里已经看到,有许多不同的方法来描述特定波场的“波高”,这些通常都被称为有效波高,或h。显然,用这个值来描述海况是一种粗略的简化。用这种方法来描述波场只有一个主导分量的简单海态是合理的,但请考虑图8.5中的两个海态。每个面板的Hs是相似的(Hs = 1.36米在顶部面板与Hs = 1.03米在底部面板),即使由光谱描绘的海况非常不同。简单地用Hs来描述海态意味着你失去了很多关于波场结构的信息。这类似于给出一个简单的最高温度值的天气预报。它不会告诉你是否需要带伞! 8.5操作波建模8.5.1背景与基础 本节着重于波浪预报背景下的操作波浪建模。如前所述,目前最先进的波浪预测模型 是相位平均的第三代模型,其中波浪谱作为其预后变量。国际预报中心最常用的模式是WAM (WAMDIG 1988;Komen et al. 1994)和WAVEWATCH III®(Tolman et al. 2002, 2009)。这些模型计算效率高,可用于大规模的全球预测。还有SWAN模型(Booij等,1999;Ris et al. 1999)广泛使用,但更多用于近岸工程应用。在Cavaleri et al.(2007)中可以找到对操作(和研究)波建模技术的回顾。 在实际预报中使用的几乎所有风波模型的基础都是波浪能谱F (F, 0)的某种形式的平衡方程,如第8.4.1节所述。最简单的形式是dF - + V .(Cg F) = Sin + Snl + Sds + Sbot (8.37) 左边表示线性传播的效应,右边表示谱波能量的源和汇。传播,在其最简单的形式中,只考虑频谱中的波分量沿大圆传播,直到波浪能量在海岸被吸收(要么作为传播算法的一部分,要么由于耗散源项)。该方程的更高级版本,如在流行模型中使用的,还考虑了折射(在浅水中由于与底部相互作用而改变的波方向)和浅滩(由于改变水深而改变的波高和波长),还有一些考虑了由于平均流的存在而产生的类似影响。到目前为止,所有的操作波模型都只考虑线性传播。现在,许多业务模型都将未解决的岛屿和珊瑚礁作为亚网格障碍加以处理。 传统上,考虑了三个源项;Sn描述了由于风的作用而输入的波浪能量,Snl描述了波浪之间非线性相互作用的影响,Ss描述了由于波浪破碎或“白顶”而损失的波浪能量。许多用于浅水应用的早期模型添加了波底相互作用源项Sbot,通常与底部边界层摩擦引起的波能损失有关。在这些源项中,非线性相互作用具有特殊的相关性。非线性相互作用的影响作为源项出现在这个方程中,因为方程中的传播描述是严格线性的。此外,相互作用对波的生长是必要的,而不是传播。它们代表了已知的在增长过程中有效延长波的最低阶过程,并且它们已被证明可以在高于谱峰的频率上稳定谱形状(例如,Komen et al. 1994)。非线性相互作用考虑能量、作用和动量在四个相互作用的波分量之间的共振交换,由频谱空间上的六维积分控制。20世纪80年代的SWAMP研究(1985年的SWAMP小组)确定了这些相互作用的显式计算对实际波动模型至关重要。离散相互作用近似(DIA) (Hasselmann et al. 1985)的发展使这在经济上可行。 Models that explicitly compute nonlinear four-wave interactions are identified as third-generation wave models. 目前的操作波模型以更详细的方式处理源项。风的输入正在转变为风波的相互作用,并可能包括对大气的能量和动量的反馈(“负输入”)。此外,波浪破碎被视为对大气湍流的影响,从而影响大气应力和波浪增长。非线性相互作用现在通常包括深水中的四波相互作用和浅水中的三波相互作用。波浪耗散现在经常解决深海中传统的白峰现象,以及深度诱导(“冲浪”)破碎的单独机制,以及影响波浪在盆地中传播的更慢的耗散机制,衰减时间尺度为几天到几周。在浅水中还考虑了许多附加的波底相互作用。最普遍的是底部摩擦源项,但由于底部不规则性,与底部摩擦、波的渗流和散射有关的其他过程,如波-沉积物相互作用,已被提出并可在一些波动模型中得到。最近特别感兴趣的是波与泥泞底部的相互作用,它既增加了一个源项,又可能修改色散关系,从而修改波的传播。对于其他过程,如波-冰相互作用和雨对波的影响,已经提出了源术语,但目前没有在任何实际的波模型中使用。 许多业务天气预报中心都有业务风浪模型。这并非偶然。在1974年的海上生命安全(SOLAS)会议上,达成了将风浪视为天气的一部分的国际协议,明确赋予天气预报中心为公众进行波浪预报的责任。然而,第一次数值波预测远远早于这一日期,在美国可以追溯到1956年(见Tolman et al. 2002的历史概述)。 许多较大的天气预报中心,如欧洲中期天气预报中心(ECMWF1,欧洲)、美国国家环境预报中心(NCEP2,美国)和澳大利亚气象局(Bureau3,澳大利亚),以6-12小时为周期,提供最多10天的海浪预报。这些中心大多使用全球波动模型,并为特殊兴趣区域提供一个或多个高分辨率嵌套区域模型。例如,本局WAM的配置(截至2009年底)见图8.6。最高分辨率的模型(蓝色边界)以0.125°的纬度和经度分辨率运行,并嵌套在0.5°空间分辨率的模型(红色边界)内,该模型又以1°嵌套在全局模型内。一般来说,更高的reso 2波浪数据http://polar.ncep.noaa.gov/waves. 3波浪数据http://www.bom.gov.au/marine/waves.shtml. 20 e 40 e 60 e 80 e 100 e 120 e 140 e 160 e 160w 140 w 120w 100 w 80 w 60 w 40w 20 w 20 e 40 e 60 e 80 e 100 e 120 e 140 e 160 e 160w 140 w 120w 100 w 80 w 60 w 40w 20 w 135 E 150 E 165 E 180 165W 150w 135 W 120 W105 W 90w 75w 60w 30x30 15x10 10x10 8x4 4x4 图8.6一些运行波模型系统的构型实例。顶部面板显示Bureau,底部面板显示NCEP 135 E 150 E 165 E 180 165W 150w 135 W 120 W105 W 90w 75w 60w 30x30 15x10 10x10 8x4 4x4 图8.6一些运行波模型系统的构型实例。顶部面板显示Bureau,底部面板显示NCEP luution模型从低分辨率模型中获取数据而不反馈任何信息,但NCEP现在使用这种模型的全双向嵌套(Tolman 2008)。NCEP系统的配置(截至2009年底)亦见图8.6。这包含了一系列不同的空间分辨率,从全球0.5°到海岸线周围4弧分(1/15度)的最高分辨率模型。波动模型的空间分辨率通常取决于波动模型从中获得其风强迫的大气模型的分辨率,此外,还取决于计算资源的可用性。在业务预测环境中,一个主要考虑因素是模型完成预测所花费的时间和结果传播的速度。 一些中心还为特定条件运行专门的波动模型;例如,NCEP运行专门针对飓风的波浪模型,具有来自飓风天气模型的专门强迫。最后,几个中心运行风波集合,以提供预测预期可靠性的概率信息。虽然这样的集合已经产生了长达十年之久,但它们还没有像相应的大气集合那样被仔细研究,并且可能还没有达到相同的成熟水平。有关海浪预报系统的详细资料,一般可在各预报中心的网站上查阅,详情见脚注。 除了模型空间分辨率的差异外,每个预报中心的波浪预报系统在其他方面的操作实现也有相当大的差异。例如,用于推动波浪模型的风力通常由中心的数值天气预报(NWP)模型提供,这些模型在细节上可能有很大差异。波动模型是否包含数据同化也会导致预测的差异。在波动模型中最广泛使用的数据来源是卫星高度计的Hs。这可以显著提高波浪预报的技巧(Greenslade and Young 2005),特别是在已知地表风有缺陷的情况下。同化Hs数据的一个限制是它不能提供观测到的波谱的任何直接信息,因此在调整模拟谱时需要做出一些假设(Greenslade 2001)。这一问题可以在一定程度上克服结合同化波谱从合成孔径雷达(SAR),如在ECMWF (ECMWF 2008)执行。原位波浪浮标还可以提供波谱,用于同化。然而,这些数据的局限性在于,与卫星数据相比,它们的分布非常稀疏,而且由于后勤原因,它们往往位于海岸附近。它们通常不用于波浪数据同化方案,这意味着它们可以用作模型验证的有价值的独立数据源。 许多业务预报中心通过由海洋学和海洋气象学联合委员会(JCOMM)支持的波浪模型相互比较研究(Bidlot et al. 2007)分享其模式结果。模型预报还与全球各地的现场浮标观测结果进行了比较。这个项目提供了一个基准测试机制质量保证波浪预报产品。每个月,所有参与者都可以获得测试结果,并在网上公布图8.7所示为一个位置的相互比较示例。这是2009年11月44005号浮标(位于大西洋西北部新罕布什尔海岸78海里处)24小时的Hs和Tp预报。 在顶部面板中,可以看到所有的波浪模型都能很好地预测Hs,天气尺度变异性被很好地捕捉到。在观测到的H周围有一些分布,对于这个例子,大多数模型都过度预测了11月15日左右出现的H峰值。Tp在这个月也被很好地捕捉到,尤其是主宰长波浪(高 44005浮标预测(t = t+24)波高和平均浮标数据 -augobs^- ecmwf -b- ukmo FNMOC AES 5 -«CEP METFR DWD■■«AUSBM-«- SHOM•JMA -&■KMA a PRTOS 2009年11月 预测(t=t+24)高峰期和44005浮标的平均浮标数据 avg obs - ecmwf UKMO -«- FNMOC - AES -*■•NCEP METFR DWD ' AUSBM "«" SHOM«JMA -o- KMA PRTOS 图8.7波间比较活动的结果示例 图8.7月中旬波动相互比较活动波周期的结果示例)以及月底向较短周期波的趋势。从3日到13日的观测和模型中都可以看到Tp的高变异性,这表明在这一时期存在许多不同的波系。 每个月的这种相互比较活动也有一些总结结果。示例如图8.8所示。这显示了均方根 Hs、Tp和u10这三个参数在所有浮标数据上的平均预报模型的平方误差(rms)。风速在地表以上10米处)。误差定义为模拟参数与观测参数之间的差值。均方根误差可以看作是对模型技巧的衡量。图8.8显示,24小时预报(1天)的均方根误差约为0.5米,尽管误差从约0.4米到约0.7米不等。对于较好的模型,用平均条件归一化的波动模型的后验和短期预测误差约为15%(结果未显示)。该图的另一个明显特征是误差随预测周期的增长。地表风的均方根误差与波浪预报的均方根误差有很强的相关性,即具有准确地表风的中心也具有较高的波浪预报技能。随着各中心天气模式的不断改进,波浪模式和这些模式在数值和物理选择方面的差异变得越来越明显和重要。在对风波建模方法进行了十年相对较小的变化之后,最近这导致了对相应波浪模型中改进物理方法的兴趣增加。 如上所述,最近几年,人们对波动模型的发展重新产生了兴趣。这一点在最近启动的国家海洋学合作计划(NOPP)项目中尤为明显,该项目旨在为操作风浪模型提供下一代源项公式。实际上,波模型中的所有源项都将在本研究中得到解决,重点是深水和大陆架物理。业务中心正在更加关注海岸波浪模型,部分原因是用户对服务的需求增加,也由于波浪模型在计算能力方面的进步,处理这一问题的能力不断增强。因此,曲线网格和非结构化网格等替代建模方法变得越来越普遍和重要。 此外,许多预报中心的运作模式正在慢慢改变。传统上,操作中心专注于孤立的局部预报问题,如天气和海浪。这些中心越来越趋向于采用综合地球系统模型方法,其中模型之间的联系被认为是提高单个模型质量的必要条件。海浪实际上是大气和海洋之间的界面。在系统设计方法中,风波模型可以成为大气-海洋综合建模系统的高级边界层模块。ECMWF在十多年前就向这个方向迈出了第一步,当时他们的风波模型开始向天气模型提供实时地表粗糙度信息(包括波浪引起的粗糙度)。在NCEP,大气-海洋耦合模式被用于气候和飓风预测。raybet雷竞技最新飓风模型的实验版本现在包括一个三向耦合系统,包括完整的天气模型(HWRF)、完整的海洋模型(HYCOM)和完整的波浪模型(WAVEWATCH III)。气象局正在开发一个类似的系统。在这样的模型中,风浪起着关键作用;它们改变了表面粗糙度,从而改变了应力; they may temporarily store momentum extracted from the atmosphere, and release this to the ocean in a geographically distant location; spray generated by waves influences (and links) momentum, heat and mass fluxes between the ocean and atmosphere. Indeed, the most complete estimates of spray production are directly related to the wave spectrum, and hence require a full wave model. Another important forecast problem in which wind waves become important is coastal inundation, where many coastal inundation problems are directly linked to momentum produced by incoming swell rather than by wind pushing up water in a tradition storm surge situation. Several decades of experience with wave-driven coastal circulation and inundation problems can be found in the civil engineering literature, but these experiences have not yet been used in operational forecasting procedures. Bidlot J-R, Li JG, Wittmann P, Fauchon M, Chen H, Lefevre J-M, Bruns T, Greenslade DJM, Ard-huin F, Kohno N, Park S, Gomez M(2007)操作波预报系统的相互比较。第十届波浪国际研讨会论文集倒推法Booij N, Ris RC, Holthuijsen LH(1999)沿海地区的第三代波浪模型 模型描述和验证。Cavaleri L, Alves JHGM, Ardhuin F, Babanin AV, Banner ML, Belibassakis K, Benoit M, Donelan MA, Groeneweg J, Herbers THC, Hwang P, Janssen PAEM, Janssen T, Lavrenov IV, Magne R, Monbaliu J, Onorato M, Polnikov V, Resio DT, Rogers WE, Sheremet A, McKee Smith J, Tolman HL, Van Vledder G, Wolf J, Young IR(2007)波模拟技术的现状。Prog Oceanogr 75:603-674 ECMWF (2008) IFS文档- cy33r1,第七部分:ECMWF波模型。http://www. Greenslade DJM(2001)澳大利亚地区ERS-2显著波高数据的同化。Greenslade DJM, Young IR(2005)非均匀背景误差对全球波数据同化系统的影响。大气科学10(2)。Hasselmann SK, Hasselmann JH, Allender, BarnettTP(1985)重力波谱中非线性能量传递的计算和参数化。第二部分:波浪模型中非线性能量传递的参数化。Holthuijsen LH(2007)海洋和沿海水域的波浪。剑桥大学出版社,剑桥 Jardine TP(1979)目测波高的可靠性。Komen GJ, Cavaleri L, Donelan M, Hasselmann K, Hasselmann S, Janssen PAEM(1994)海浪动力学和建模。剑桥大学出版社,剑桥,p 532 Kundu PK(1990)流体力学。学术出版社,圣地亚哥 Ris RC, Holthuijsen LH, Booij N(1999)沿海地区第三代波浪模型 验证。沼泽组(1985)海浪建模全会出版社,伦敦,p 256 Tolman HL(2008)风波建模的马赛克方法。海洋模型25:35-47 Tolman HL (2009) WAVEWATCH III 3.14版的用户手册和系统文档。NOAA/NWS/NCEP/MMAB技术说明http://polar.ncep.noaa.gov/mmab/papers/tn276 / MMAB_276.pdf Tolman HL, Balasubramaniyan B, Burroughs LD, Chalikov DV, Chao YY, Chen HS, Gerald VM (2002) NCEP风产生的海洋表面波模型的开发与实现。WAMDIG (1988) WAM模型——第三代海浪预报模型。J理论物理 Young IR(1999)风产生海浪。爱思唯尔科学有限公司,阿姆斯特丹 继续阅读:大陆架上的潮汐和内波 这篇文章有用吗?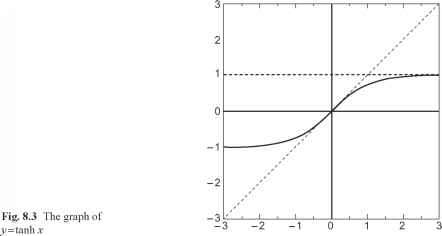
8.4基本定义
8.4.1波浪谱
8.4.2有效波高
8.5.2运营中心


8.5.3前景
参考文献
读者的问题
-
PIRJO2个月前
- 回复
-
Vittore Genovesi2个月前
- 回复