全球业务海洋学系统概述
Eric Dombrowsky
摘要全球海洋数据同化实验(GODAE)已经开发了几个常规海洋预报计算系统。它们用于交付操作服务。这些系统的基础是:(1)输入从空间和现场获得的高质量观测数据,在测量完成后不久即可获得,(2)最先进的真实数值模型配置,以及(3)将观测数据和模型物理相结合的高效同化系统。为了进行常规操作,这些组件必须集成到一个完整的系统中,以实现常规操作和实时服务交付。我们在这里介绍这些功能,强调它们的具体特征。
16.1介绍
业务海洋学(以下称为OO)是由GODAE在很大程度上推动的一个概念(Smith和Lefebvre 1997)。可操作性是一个广泛用于不同社区的术语,但是它的含义以及对其含义的理解在不同社区之间差异很大。因此,为了避免混淆和不同的解释,GODAE给出了精确的定义。根据GODAE战略计划(IGST 2000), Operational是指“以常规和有规律的方式进行的处理,具有预先确定的系统方法和持续的性能监控”。
根据这一定义,需要两个重要的因素:(1)生产必须是定期和系统的,服务计划必须预先确定,以便用户准确地知道他们将获得哪些服务,何时以及如何获得服务;(2)不断监测科学(产品质量)或技术性能,以确保服务质量。
东布罗斯基(H)
墨卡托Océan,运河技术公园,8-10 Rue Hermes, 31520 Ramonville Saint Agne,法国e-mail:(电子邮件保护)
A.席勒,G. B.布拉辛顿(编),21世纪运作海洋学,397
DOI 10.1007/978-94-007-0332-2_16,©施普林格Science+Business Media B.V. 2011
-
 space observations, (2) in .situ measurements, and (3) ocean circulation models coupled with data assimilation systems to provide ocean forecast services")
- 图16.1业务海洋学实时系统的三大支柱:(1)空间观测,(2)现场测量,(3)与数据同化系统相结合的海洋环流模型,以提供海洋预报服务
 space observations, (2) in .situ measurements, and (3) ocean circulation models coupled with data assimilation systems to provide ocean forecast services")
实时面向对象系统基于3个支柱,如图16.1所示:(1)遥感观测系统,(2)现场观测系统,(3)同化海洋环流模型(OGCMs),将这些观测结合起来,发布预测,并向用户提供服务。
本文将专注于开发用于提供实时面向对象服务的系统,包括仅针对海洋物理的预测。本文不考虑生物地球化学服务和再分析。在简要介绍之后,第16.2节简要介绍GODAE业务海洋学系统。第16.3节介绍了业务系统的关键功能要素,这些要素通过处理链将输入数据转换为交付给用户的服务。这个关键元素及其特征的列表来自于对GODAE内部开发的现有系统的分析。第16.4节将介绍并讨论OO系统的一些重要的非功能方面。
16.2 GODAE OceanView操作海洋学系统概述
在过去的十年中已经开发了一些面向对象系统。这些系统的各个方面的详细介绍可以在海洋学杂志的特刊上找到,vol .22- n0.3 - 2009年9月,专门介绍GODAE。
特别是,Dombrowsky等人2009年给出了截至2008年GODAE实时系统状态的概述。下表16.1给出了截至2010年3月的更新
表16.1截至2010年1月,13个GODAE实时系统的主要特征:BLUElink>(澳大利亚)、C-NOOFS(加拿大)、ECCO-JPL(美国)、FOAM(英国)、HYCOM/NCODA(美国)、MERCATOR(法国)、MFS(意大利)、MOVE/MRI(日本)、NCOM和NLOM(美国)、NMEFC(中国)、RTOFS(美国)和TOPAZ(挪威)。第一列列出这些系统的名称(按字母顺序排列),第二列列出所用OGCM的名称,第3列列出覆盖范围(全球和/或区域),第4列列出所用OGCM配置的水平分辨率,第5列列出垂直分辨率的主要特征(类型、层数/层数),最后一列列出所用数据同化系统的类型。我们用红色表示具有全球覆盖的系统,用蓝色表示具有涡流分辨能力的系统(阈值1/10°)。我们现在有3个系统为全球海洋提供涡旋分辨预报服务
表16.1截至2010年1月,13个GODAE实时系统的主要特征:BLUElink>(澳大利亚)、C-NOOFS(加拿大)、ECCO-JPL(美国)、FOAM(英国)、HYCOM/NCODA(美国)、MERCATOR(法国)、MFS(意大利)、MOVE/MRI(日本)、NCOM和NLOM(美国)、NMEFC(中国)、RTOFS(美国)和TOPAZ(挪威)。第一列列出这些系统的名称(按字母顺序排列),第二列列出所用OGCM的名称,第3列列出覆盖范围(全球和/或区域),第4列列出所用OGCM配置的水平分辨率,第5列列出垂直分辨率的主要特征(类型、层数/层数),最后一列列出所用数据同化系统的类型。我们用红色表示具有全球覆盖的系统,用蓝色表示具有涡流分辨能力的系统(阈值1/10°)。我们现在有3个系统为全球海洋提供涡旋分辨预报服务
OGCM |
域 |
水平 |
垂直 |
同化 |
|
BLUElink > |
妈妈4 |
全球 |
1°G |
47 z-levels |
合奏OI |
区域 |
°R 1/10 |
||||
C-NOOFS |
尼莫 |
可以。Atl。 |
1/4° |
50 z-levels |
没有一个 |
ECCO-JPL |
麻省理工学院OGCM |
全球 |
1°x 0.3° |
46 z-levels |
卡尔曼 |
滤镜+平滑 |
|||||
泡沫 |
尼莫 |
全球 |
1/4°G |
50 z-levels |
分析校正 |
区域 |
R 1/12 |
||||
HYCOM / |
HYCOM |
全球 |
°1/12 |
32混合 |
多元OI |
NCODA |
|||||
墨卡托投影 |
尼莫 |
全球 |
1/4°+ 1/12°g |
50 z-levels |
寻求过滤器 |
区域 |
°R 1/12 |
||||
MFS |
尼莫 |
地中海。 |
°1/16 |
71年z-levels |
3 d-var |
移动/核磁共振 |
MRI.com |
全球 |
1°G |
50 z-levels |
3 d-var |
区域 |
1/2°+ 1/10°r |
||||
NCOM |
砰的一声 |
全球 |
°1/8 |
42混合 |
2d-oi + 3d-var |
NLOM |
NLOM |
全球 |
°1/32 |
6 + 1层 |
2 d-oi |
NMEFC |
圈/中科院 |
Tr, Pac。 |
2°x 1° |
14 z-levels |
3 d-var |
RTOFS |
HYCOM |
Atl。 |
4-18公里 |
26个杂交 |
3 d-var |
黄玉 |
HYCOM |
Atl。+北极 |
16公里 |
22混合 |
EnKF 100成员 |
本文中介绍的系统的主要特征及其在国际GODAE指导小组(IGST)所做工作的基础上继续发展的倡议:GODAE OceanView (Le Traon et al. 2010)。
从表中我们可以看到,OceanView合作伙伴在全球几个国家运营了13个系统,提供实时预报服务:雷竞技手机版app
•在美国,有几个机构操作的几个系统:
- ECCO在喷气推进实验室运作,
-美国海军在NAVOCEANO操作的HYCOM/NCODA, NCOM和NLOM系统,
-在NOAA运行的RTOFS系统,
•在欧洲,在不同的国家运行多个系统:雷竞技手机版app
-由英国metooffice运营的FOAM
- MERCATOR由法国MERCATOR Océan运营
-由INGV在意大利操作的MFS
-由NERSC和Met操作的TOPAZ。挪威没有
•在澳大利亚,由气象局运营的BLUElink >
•在加拿大,由加拿大渔业和海洋(DFO)运营的c - noof
•在中国,由国家海洋环境预报中心(NMEFC)运营的NMEFC系统
•在日本使用由日本Met操作的MOVE/MRI。机构(日本)。
读者可以参考Dombrowsky等人2009年的论文,以找到更多细节,并参考所使用的建模和同化工具。
只有少数系统具有全球涡流分辨能力,如美国海军和墨卡托Océan,他们操作全球涡流分辨系统。这主要是由于计算机资源的限制(下面讨论)。为了达到涡旋分辨水平分辨率,几个中心在其感兴趣的区域开发并运行了区域高分辨率配置,这些配置嵌入到更大规模的配置中。例如,MOVE/MRI已经实现了一套完整的系统,从全球配置的1°水平分辨率降至北太平洋,然后在他们感兴趣的局部区域(即黑潮区域)降至1/10°。
在美国,NOAA和海军目前正专注于开发基于HYCOM配置的通用工具,该工具将逐步取代现有系统(例如NLOM和NCOM)。
在欧洲,在GMES(全球环境与安全监测欧洲倡议,见Ryder 2007)范围内,OceanView合作伙伴(与其他非OceanView合作伙伴相关联)目前正在开发一种向用户提供海洋核心服务的综合能力。这些进展发生在MyOcean (Bahurel et al . 2010)的3年项目中,该项目由欧盟委员会资助。MyOcean于2009年初启动,旨在建立包括GODAE在内的现有资产,GODAE是欧洲海洋核心服务的基地。
除了现有的能力外,其他国家已经在运行或计划实施这种系统的项目,其中包括巴西和印度。雷竞技手机版app这里没有列出它们,因为即使它们很快就会加入OceanView,但它们还不是OceanView的一部分。OceanView的目标之一是,一旦这些新兴的运营海洋学参与者的案例被提出,他们就会被纳入其中。加入OceanView的最低要求是:(1)拥有强大科学基础的国家对国内运营海洋学发展的多年支持,以及(2)愿意加入OceanView。
16.3面向对象系统的关键功能16.3.1观测、模型和数据同化16.3.1.1近实时质量输入数据
要运行面向对象系统,需要输入观测数据和大气强迫,其特征是:实时高质量和高可用性。
这是面向对象最突出的挑战之一,因为没有这些输入,就不可能期望面向对象系统的任何性能(例如预测技能)。
海洋观测主要用于两个目的:
•为了同化它们,使系统模拟的海洋状态尽可能接近观测到的真实海洋状态,
•用于产品验证。
在现有的面向对象系统中考虑的观察结果如下:
•遥感:例如地表高程,地表温度、海洋颜色,冰浓度和漂移。
•原位:例如,ARGO剖面仪、xbt、ctd、漂流浮标,系泊站。
对于这些观测,需要得到质量控制(QC)的数据,在用最先进的算法进行测量后尽快处理,以获得与延迟模式获得的质量相当的数据,并立即传播到面向对象中心。
已经设立了专门的处理中心,以便在GODAE期间处理上述大多数观测结果。这是强有力的国际组织和长期努力的结果。
所使用的数据通常是点测量。一些系统还使用网格产品。例如,当所使用的同化系统不够先进,无法处理点测量时,就会出现这种情况。在这种情况下,离线网格程序被认为是有用的。然而,我们的目标是开发观测算子,使其能够处理尽可能接近测量值的数据,以便考虑到观测中包含的大部分空间/时间信息。
观测结果有时是糟糕的,例如当传感器本身或实时处理出现问题时。在这种情况下,数据必须被QC程序拒绝,因为任何进入系统的坏数据如果不被拒绝,就会在被分析的字段中产生虚假的特征,并且这些坏数据被合并后的恢复可能会持续很长一段时间,直到其影响消失,最终可能永远无法完全实现。
另一方面,由于观测数据对系统性能至关重要,必须尽可能多地进入系统,而这些观测数据又过于稀疏(现有观测系统对海洋及其变异性的采样在很大程度上不足)。任何数据的丢失对服务质量都是有害的(在观测系统中几乎没有冗余)。这是面向对象必须面对的主要挑战之一:拒绝所有坏数据,但拒绝尽可能少的好数据。这就是输入数据QC的作用,正如Cummings 2010(参考本书)所描述的那样。
虽然一些GODAE中心已经发展了自己的观测采集和处理能力,如为美国海军系统提供高度计数据的高度计数据融合中心(ADFC),其他一些则依赖于专门处理这些观测问题的中心,如物理海洋学分布式活动档案中心(PO.DAAC)或用于高度计的数据统一和高度计组合系统(DUACS),用于现场观测的科里奥利系统(CORIOLIS)。或全球高分辨率海温(GHRSST),以传播海温观测资料。
就面向对象中心的实时观测流而言,仍有改进的空间,进一步减少测量时间和观测同化可用性之间的延迟,目前的延迟根据观测类型从几个小时到几天不等。
16.3.1.2力场设置
除观测外,大气强迫场也需要用于在过去现在和将来(预测)。它们来自数值天气预报(NWP)服务的输出,作为高层大气中的大气变量,用于交互计算(BULK公式)热量、动量和/或淡水通量,或直接作为这些通量的估计。在后一种情况下,NWP服务做出的这些估计通常会考虑稳定的海洋,这与真实的海洋不同,也与OO系统模拟的海洋不同。这可能会产生虚假的影响,例如在上层海洋中积累偏差(对于非耦合系统,海洋对大气没有回溯作用)。
对于近期,遥感数据也可用于计算强迫项,其中包括风和地表温度卫星观测。
有关输入数据的更多细节,请参见Ravichandran 2010;2010年的Le Traon和2010年的Josey(参考在这本书中)
使用大气强迫有几种选择,其中包括:
•包括或不包括高频(分析日周期,每小时、每3小时、每6小时或每天字段的使用),
•将力与观测结果合并,
•将海洋预报范围扩大到大气预报范围之外:使用不同的方法回归到气候强迫:例如墨卡托Océan和美国海军,
•在室内大气模型中使用(例如:美国海军系统的NOGAPS),
•运行耦合系统(例如:用于热带气旋的NCEP RTOFS系统)。
一些OceanView面向对象系统是由会议机构自己运行的;他们使用自己的NWP产品。例如,metooffice(英国)、NOAA/NCEP(美国)、MRI/JMA(日本)、BoM(澳大利亚)和EC(加拿大)就是这种情况。其他一些系统依赖于外部NWP系统,如Mercator Océan(法国),MFS(意大利),TOPAZ(挪威)使用ECMWF产品,NMEFC(中国)使用NCEP产品。
16.3.1.3型号配置
需要模型配置来进行预测,即估计未来的海洋状态及其演变。该函数的目标是提供比气候学和持久性更好的预测估计值(使用nowcast估计值并假设没有时间演化来预测未来)。
为了能够发布预报(甚至是临近预报,因为实时观测有一定的延迟),需要一个海洋数值动力学模型。在过去,一些系统是基于简化模型开发的(例如准地转模型),但是现在,由于计算能力的提高和开发最先进代码的社区的出现,所有系统都使用数值OGCM来求解原始方程。
这里的一个关键点是,OGCM代码应该由一个适合面向对象的大型社区来使用和开发,最好包括来自学术研究社区的科学家。例如,NEMO (Nucleus For European modeling of the Ocean)代码倾向于在欧洲被面向对象中心广泛采用,这要感谢在科学和操作社区中维护这一代码的共同努力。类似地,HYCOM (HYbrid Coordinate Ocean Model)现在被美国的主要面向对象中心采用,受益于大型社区的投资。
这些ogcm在实现上有几个不同之处,其中包括垂直坐标系、混合方案、边界层、湍流闭合,自由表面,平流方案。然而,有一个共同的需要:
•这些代码必须在现实的配置中实现,这意味着拥有良好的水深测量数据集(对于全球系统,解决北极奇点的网格,如图16.2所示的三极网格)
•它们必须在计算和数值方案方面是高效的(例如,通过消息传递接口(MPI)和域分解技术实现显式并行化),因为需要减少最后一个数据进入系统的引用日期和服务交付给用户的时间之间的运行时间(时效性)。
这些配置的水平分辨率可以是涡流分辨率、允许涡流分辨率或低分辨率,这取决于需求和计算能力。一般认为,要解决涡流问题(涡解系统),水平分辨率至少应达到1/10°。这些配置要么是流域规模的,要么是全球规模的,这同样取决于各中心的需求和能力。垂直分辨率一般在接近表面的地方增强,一组O(50层)。
在面向对象系统中使用的模型的细节可以在Barnier(2010)、Chas-signet(2010)和Hurlburt(2010)中找到(参考文献在同一本书中)。
短期(几天)天气预报一般具有确定性,由同化方案(分析)获得的初始条件开始进行单一模式运行,并受到天气大气预报的强迫。预报范围主要受大气预报范围(天气强迫的可用性)的限制。然而,预测能力已证明海洋超出了大气的可预测范围:例如,美国海军系统,Smedstad等人,2003年(长达20-30天),恢复到超出天气预报范围的气候强迫。此外,一些研究表明,使用非确定性大气预报可以提高海洋的可预测性(drilllet et al. 2009)。
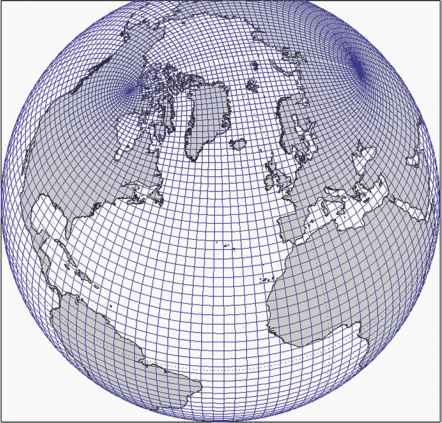
图16.2 Mercator和FOAM求解北极奇异点的网格示例。网格是三极ORCA网格(Madec and Imbard 1996)。这是一个经典的墨卡托网格在北半球给定的纬度。然后,它平稳地演变成一个偶极网格,奇点被放在大陆上。为了可见性,这里只显示了实际使用的网格线的子示例。类似的三极网格用于美国全球HYCOM配置
图16.2 Mercator和FOAM求解北极奇异点的网格示例。网格是三极ORCA网格(Madec and Imbard 1996)。这是一个经典的墨卡托网格在北半球给定的纬度。然后,它平稳地演变成一个偶极网格,奇点被放在大陆上。为了可见性,这里只显示了实际使用的网格线的子示例。类似的三极网格用于美国全球HYCOM配置
然而,大多数海洋短期确定性预报是利用确定性大气强迫进行的。
对于更长的时间尺度(从月到气候年代际运行),OGCM通常与大气GCM耦合,raybet雷竞技最新最终与其他地球系统组件模型(如水文和冰)耦合,以确保所有这些组件之间的相互作用。
其他方法,如大气中使用的集合(统计)预报,或通过超级集合技术(Krishnamurti et al . 1999)将几个系统产生的几个预报合并在一起(Krishnamurti et al . 1999),目前还不太发达海洋预报中心。它们可能在不久的将来发展成为天气确定性预报的补充。
16.3.1.4高效同化技术
在面向对象中,同化系统旨在实现两个目标:(1)为确定性预测提供最佳初始条件;(2)提供最适合过去观测的模式轨迹,以便尽可能获得关于过去海洋状态的最佳信息,最终达到实时。因此,同化方案将观测数据和先前的模式预测(也称为背景状态)合并,通过分析程序考虑它们的相对误差特征,从而在初始化模式以运行预测所需的模式空间上提供最佳海洋变量集。
请注意,这两个目标不一定是兼容的,最好的模型轨迹不一定为模型预测提供最好的初始条件。第一个目标适用于业务预测活动,而第二个目标更多地涉及再分析活动。
大多数分析方案都基于最佳线性无偏估计(BLUE)理论,如最优插值(OI)、卡尔曼滤波器(KF)、变分算法(VAR)及其变体,如考虑到分析中未来观测值的顺序平滑器。这些同化方案的设计是为了计算一组最佳权重,以应用于背景状态(以前的预测)和观测的加权平均,同时考虑到它们的误差特征。
所有这些方案都作为连续的预测/分析周期工作,创建一个不连续的轨迹,在更新周期间隔具有典型的锯齿形状。为了避免对模型轨迹的相应冲击,在几个运行同化系统中引入了增量分析更新(IAU,见Bloom et al. 1996)。它基本上包括在给定时期(通常从几个小时到几天)的每个时间步骤中添加一小部分增量作为强制项,而不是在给定时间步骤中添加全部增量。这导致了一个平滑的轨迹,限制了分析冲击后的瞬态。对应的是这个轨迹不再遵循控制方程在IAU期间
4D-VAR方案是不同的,因为它们的目标是在保持物理平衡的同时获得最佳的符合观测的连续模型轨迹:在模型集成期间不添加统计增量。它们包括优化轨迹,改变系统的一些自由度(如初始条件、大气强迫等),使用凸优化(二次代价函数最小化)。它们需要使用伴随模型来降低最小化成本(计算成本函数的梯度,只需对模型及其伴随进行一次正向和向后积分)。目前OO预测中心还没有实现这种4D-VAR方法。
关于同化理论和实践方面的更多细节,请参见Zaron 2010;Brasseur 2010和Moore 2010(参考在同一本书中)。
模型分辨率和同化方案的复杂性之间存在明显的竞争。该函数面向对象的一个关键方面是在模型的计算成本和同化方案之间取得良好的平衡。
例如,应用O(100)个成员集合卡尔曼滤波器将使模型计算成本乘以O(100),而将水平分辨率翻倍只会使成本乘以O(10)。由于模型分辨率仍然是许多应用预测技能的一个关键限制因素,大多数系统都是基于同化方案,其计算成本与单独的模型是同一个数量级。例如,美国海军和墨卡托(Mercator) Océan从开发具有相当简单同化系统的区域高分辨率模型开始,直到计算机能力允许实施更复杂的同化方法和全球模型。
挪威的TOPAZ系统是GODAE系统的一个例外。它从一开始就实施了一种先进的(昂贵的)同化方案(集成卡尔曼滤波器),从相当适度的水平分辨率模型配置开始,并随着计算能力的发展而增加。
16.3.2产品生成和质量监控
原始模型产品通常是包含模型计算网格上的海洋变量的文件。计算网格对于大多数应用程序并不一定足够。它们可以是交错的(荒川网格),旋转,拉伸,不规则,可能随时间而变化(如HYCOM中垂直线上的等视坐标)。
因此,通常需要对原始模型输出进行后期处理,以创建更方便用户的数值产品。该功能可以包括在标准网格上重新映射、平铺、平均、应用文件名和格式约定、将模型变量转换为面向用户的产品。
此功能对于将服务交付给用户非常重要。然而,可能是因为目标用户和所提供的服务是特定于每个OceanView中心的,因此在OceanView系统中有各种各样的功能实现。
我们在上面已经看到,创建用于提供服务的原始产品的功能(模型、同化)处于当前科学知识的前沿。此外,产品的质量取决于输入数据的数量和质量。这两个原因足以暗示系统产品的实施质量控制和监控。主要有两个时间尺度需要考虑:
•短循环验证:在模型输出和产品分发给用户之前,需要检查它们,
•长循环验证:产品的质量可能会缓慢变化,例如,水团的偏差可能在几个月后出现,或者季节性偏差也可能出现。
第一类包括自动化质量控制,例如与预定义阈值的比较,以及基于自动化图形、指标和指标生成以及交互式查看的软件辅助人类专业知识。
例如,墨卡托Océan操作员在每次预测执行时,都遵循常规控制程序对产品进行例行检查。这些控制基于系统自动生成的图像和诊断,操作人员将其与操作验证手册中提供的模板和阈值进行比较。这使他们能够检查日常生产是否符合系统的预期。为了定义参考,负责系统开发的科学家对实时系统的精确副本进行了长时间(至少一整年,最好是多年)的后向同化集成。此参考后推模拟用于校准不同的验证阈值,并在操作验证手册中定义提供给操作人员的实时例行验证的参考。然后,一旦系统正常运行,验证所有全球和区域预测产品的平均时间不到1小时(挂钟)。如果有疑问,操作人员还可以使用交互式快速查看软件进一步调查4-D场可视化产品的质量(还可以与观测结果、气候学进行比较,查看强迫场,放大区域和深度等)。在最终情况下,他们发现一个异常,他们无法解决预定义的程序,他们打电话给专家(科学家)进一步调查问题,以解决它,并尽快恢复正常操作。
第二类质量控制是基于定期研究,观察区域或特定现象,这取决于真实海洋中发生的情况或机会(例如在一个区域进行的科学运动)。这些研究可以包含与其他系统的比较(正如在GODAE中所做的那样,参见Hernandez et al 2009)。在任何情况下,这些质量控制研究都必须尽可能详尽(所有地区、所有季节和所有现象)。就人力资源而言,这是极其昂贵的,只有在用户和科学界的大力参与下才能负担得起。
16.4非功能方面16.4.1运营资源
系统必须按照导言中业务定义所述的那样,在常规基础上运行,并不断有系统地监测业绩。这意味着需要业务资源来确保服务的连续性。这涉及到IT资源(计算、存储和网络),也涉及到人。负责这些工作的工作人员将会参与其中,如果有人因为各种原因不能上班,还会有后备人员。这种活动不能仅由研发类型的人员来完成,而且从长远来看与“尽最大努力”的方法不兼容。
此外,最好的研发系统也可能不适合用于运营目的。例如,一个在大多数时候都能给出非常好的结果,但并不总是收敛的系统将不能提供持续的服务。
要实现一个面向对象系统,必须不仅根据产品质量(科学性能),而且根据服务可用性来定义性能目标。操作活动包括相对于目标的有效性能的持续度量,以及在每次系统升级中所取得的进展(至少是非回归)的度量。
16.4.2研究与开发
对于某些应用程序,我们今天所能实现的(技术和科学推动)和用户需求(用户拉动)之间的差距仍然很大,为了更好地匹配用户在准确性和性能方面的需求,面向对象系统必须基于处于研究前沿的成分,如上面描述的最先进的模型和同化技术。
由于我们的知识和工具的进步,希望这种差距能够(并不断)缩小。如果有足够的与面向对象开发相关的研究工作,就可以做到这一点。这就是为什么大多数OceanView集团都有强大的内部研发工作来支持他们的运营系统。
16.4.3用户参与
面向对象系统是为向用户提供服务而构建的,用户对服务质量的反馈对服务持续改进的良性循环至关重要。GODAE开发的所有成功的OO系统都有强大的用户基础。例如,在美国、澳大利亚、加拿大、英国和法国等几个国家的GODAE期间,海军作为支持用户在面向对象的发展中发挥了重要作用。
然而,通过用户在面向对象开发中的真正参与,必须有组织地获得这种反馈。
16.4.4高性能计算设施
涉及涡解盆地尺度模型配置和下降同化方案的运行系统需要高性能的计算设施。
例如,1/12°Mercator Océan全球模型有3059 * 4322 * 50个网格点,即O(109)个网格点。对应的3D数组(对于一个变量,例如温度)在计算机内存中代表5.3 GB。相应系统(同化和模型)的总内存大小约为1tb。
该系统每周运行2周,有2次分析,它有一个向后的IAU(这意味着每个同化周期运行两次模型),然后发布7天的预测。它运行在Météo-France NEC SX-9机器的4个节点(64个处理器)上。单个模型每周需要1小时(挂钟)(非潮汐模型的时间步长为480秒),每次分析需要0.75小时(挂钟)。这意味着每周总共需要9小时(2个分析,35个模型日和诊断计算)来提供预测。
将分辨率加倍以更好地满足用户的要求,因为1/12°几乎不足以解决他们感兴趣的物理问题,这意味着在同一台计算机上,内存大小乘以4,CPU时间需要乘以8。
这表明,计算资源仍然是发展全球高分辨率业务海洋学系统的一个关键限制因素,而能够运行这种系统需要高性能的计算设施。希望计算能力有规律地增长,遵循摩尔在1965年提出的经验定律(称为摩尔定律),该定律通常承认可用的计算能力每18个月翻一番。
16.4.5存储、传播能力和服务提供
OO系统生成大量数据,这些数据必须被物理存储以提供服务。
例如,Mercator Océan全球1/12°系统每周生成的容量为0.5 TB,而Mercator Océan将在2010年归档的总容量为60tb。
如果不能让用户快速方便地访问这些数据,生成和归档这些数据将是无用的。
这涉及到定期实时生成的数据,以及必须存档的过去数据,以便(1)根据过去的数据提供服务(一个常见的用户请求),(2)评估系统长期升级的性能,以及(3)计算气候数据集(另一个常见的用户请求)。
这个问题不仅是存储容量的问题,也是有效访问所存储数据的问题。这意味着需要有有效的系统,使用户能够直接及时地取得他们所需要的资料。如此庞大的数据集无法通过简单的“类似ftp”的下载传递给任何人,特别是对于那些没有强大IT能力的人来说。
为了使这些数据对用户有用,需要实现基于(1)访问速度快、网络带宽大的大型实时数据存储库,(2)帮助用户浏览档案(目录、目录、文档和元数据)、预览数据和提取所需内容(高效的子集设置、聚合、提取和重映射工具)的高效传播系统。
希望存在一些技术(如OPeNDAP/THREDDS和与大数据共享系统相关的LAS),它们是有效的,并且随着面向对象系统的发展而快速发展。
除了软件工具之外,还必须设置一个人力组织:服务台(或帮助台)来帮助用户处理数据、注册请求并确保服务交付。这意味着必须将电话号码、电子邮件地址、要呼叫的人的姓名传递给用户。这也意味着必须在传播产品的中心建立一个专门的组织,并有专门的人致力于这些任务。这也是一个操作功能。
16.5结论
我们在这里看到了业务海洋学系统的存在。由于国际间的协调,它们已经在一些国家得到了发展雷竞技手机版app海洋观测系统,并感谢GO-DAE内部的协调行动。目前,共有13套系统(其中3套为全球涡旋解决系统)在运营中心进行日常运营,为用户提供高质量的日常运营服务。
在不久的将来,GODAE OceanView将出现其他系统并加入这一国际努力。
如果没有建立海洋观测系统的国际努力,包括测高和ARGO自主现场测量,以及从这些观测系统近乎实时地提供高质量数据,所有这些发展是不可能实现的。
所有为提供实时海洋预报服务而开发的操作系统都是基于这些学科现有知识的前沿的最先进的海洋模型和同化技术。这意味着,如果没有强有力的研发努力,OO就无法得到进一步的发展。
在操作环境中运行预测系统意味着要采用严格的工程方法来设计和实现这些系统。我们已经介绍了目前实现的主要科学函数(例如模型、同化)的主要特征,更具体地说,应用于这些函数的计算效率要求能够在科学性能和服务交付的及时性之间取得良好的平衡,这在面向对象上下文中非常重要,对于学术研究或再分析目的可能不那么重要。
参考文献
Bahurel P, Adragna F, Bell MJ, Jacq F, Johannessen JA, Le Traon PY, Pinardi N, She J(2010)海洋监测与预报核心服务,欧洲MyOcean实例。Bloom SC, Takacs LL, DaSilva AM, Levina D(1996)使用增量分析更新的数据同化。monwea Rev 124:1256-1271
Dombrowsky E, Bertino L, Brassington GB, Chassignet EP, Davidson F, Hurlburt HE, Kamachi M, Lee T, Martin MJ, Mei S, Tonani M(2009)运行中的GODAE系统。海洋学22 (3):80 - 95
Drillet Y, Garric G, Le Vaillant X, Benkiran M(2009)中范围北大西洋可预测性对大气预报的依赖。海洋科学2(2):43-55
Hernandez F, Bertino L, Brassington G, Chassignet E, Cummings J, Davidson F, Drevillon M, Garric G, Kamachi M, Lellouche J-M, Mahdon R, Martin MJ, Ratsimandresy A, Regnier C (2009) GODAE内部的相互比较研究。海洋学22 (3):128 - 143
IGST(国际GODAE指导小组)(2000)全球海洋数据同化实验战略计划。GODAE第6号报告,2000年12月
Krishnamurti TN, Kishtawal CM, LaRow TE, Bachiochi DR, Zhang Z, Williford CE, Gadgil S, Surendran S(1999)利用多模式超级集合改进天气和季节气候预报。raybet雷竞技最新科学》285(5433):1548 - 1550。doi: 10.1126 / science.285.5433.1548
Le Traon PY, Bell M, Dombrowsky E, Schiller A, Wilmer-Becker K (2010) GODAE海洋观:从长期海洋分析和预报国际计划的实验。见:Hall J, Harrison DE, Stammer D(编)海洋观测09论文集:持续海洋观测和社会信息,第2卷,欧空局出版物WPP-306,意大利威尼斯,2009年9月21-25日
Madec G, Imbard M(1996)克服北极奇点的全球海洋网格。Clim Dyn 12:381-388
摩尔GE(1965)在集成电路中填充更多的组件。电子杂志38(8):114-117
Ryder P (2007) GMES快速轨道海洋核心服务,战略实施计划。GMES海洋核心服务实施小组向欧盟委员会GMES局提交的报告
Smedstad OM, Hurlburt HE, Metzger EJ, Rhodes RC, Shriver JF, Wallcraft AJ, Kara AB(2003)一个可操作的涡流分辨1/16°全球海洋临近预报系统。J Mar Sys 4041:341-361
刘建民,李建民(1997)全球海洋数据同化试验。1997年10月15-17日,法国比亚里茨,在“2000年代监测海洋:综合方法”上发表的论文
其他课堂讲稿(同一期)
卡明斯说,
Ravichandran, Le Traon和Josey负责输入数据,Barnier, chassinet和Hurlburt负责Zaron模型,Brasseur和Moore负责数据同化
继续阅读:业务海洋预报系统设计
这篇文章有用吗?
