卫星风场
-

- 图18.6 2009年9月13日实时收到的概要文件,表示从以前检索得到的最佳概要文件和概要文件的来源

使用观测到的海表温度有哪些已知的限制海洋预报具有昼夜暖肤效果。需要执行特定的算法质量控制与基础温度相关(参考全球高分辨率海面温度(GHRSST)科学团队的在线定义,http://www.ghrsst.org/SST-Definitions.html).地基温度具体指近地表温度海洋温度不包括白天的皮肤效应。在实践中,观测数据在分析中被保留,因为受到基于一天时间的日集肤效应和作为近地表混合代理的10米风的强度的影响(Donlon et al. 2002)。该算法不试图校正任何日影响的温度值,因此白天的温度将包括一个小的残余偏差。
夜间海温观测也受到冷蒙皮效应的影响,但与白天偏差相比,这是一个相对较小的扰动。算法对大气风的限制更小,覆盖范围更大。因此,与白天产品相比,夜间基础海表温度代表了更可靠的估计,并提供了更大的覆盖范围。目前大多数海洋预报系统没有明确表示日蒙皮层,这需要垂直分辨率<1 m。因此,顶层模型网格内的温度以及表层的统计协方差与基础温度产品是兼容的。然而,应该指出的是,一些海洋模式正在实现更精细的表面分辨率,以便在整个预测过程中反映部分日变率。这样的模型需要一个更复杂的策略来限制日变化与观测。
微波传感器通过云层观测海温,而不是通过降水观测,因此在远离热带辐合带的红外线上提供了更好的覆盖范围。微波波段将AMSR-E的海表温度观测分辨率降低到~25 km/pixel。这个分辨率与目前预测系统网格的分辨率(大约一半)相当。然而,来自陆地边界的干扰降低了海岸线两个像素(或~50公里)范围内的性能。AMSR-E没有观测到温度变化最大的那部分大陆架,对海峡和海湾的覆盖范围有限。在TERRA上的AMSR-E轨道是太阳同步的,为带状观测提供了白天(上升)和夜间(下降)的赤道交叉。AMSR-E观测数据提供有效地基温度的百分比如图18.7所示。夜间观测图18.7a, c与白天观测图18.7b, d相比提供了更大的覆盖范围,这与南方夏季和冬季的预期一致。请注意,有一条特定的带状线似乎提供了较低的覆盖范围,但它是卫星轨道>周期24小时和一个地球轨道24小时周期之间的人工差异。下降和上升带状都显示热带辐合带和季风的覆盖范围减少,尽管这些位置随季节而变化。在高纬度地区,海温覆盖接近100%冰边缘大气条件是大风和干燥空气。来自AMSR-E的基础SST必须删除所有像素
-
/ desending(desc) orbits a summer, desc, b summer, asc, c winter (desc) and d winter (desc)")
- 图18.7 AMSR-E观测到的南方季节和上升(asc)/下降(desc)轨道的天数百分比a夏季、desc、b夏季、asc、c冬季(desc)和d冬季(desc)
/ desending(desc) orbits a summer, desc, b summer, asc, c winter (desc) and d winter (desc)")
被沉淀物污染的,达到选定阈值的。在某些应用程序中,需要最大的覆盖率,可以使用更高的阈值。然而,对于海洋预测(基础温度),更保守的方法是重要的。所谓二级预处理(L2P)产品(参考http://www.ghrsst.org/html)为海洋预报应用程序提供了诊断和选择阈值所需的所有字段。
NOAA AVHRR系列一直是一个具有宽波段红外传感器和太阳同步轨道上多颗卫星的操作平台。NAV-OCEANO提供近实时的合并、基础温度、带状L2P产品。1 km左右的分辨率高于现有和近期的海洋预报系统。这允许构建超级观测(例如,Lorenc 1981;Purser等人,2000),减少了表示误差,增加了分析中的权重。与微波传感器相比,更高的分辨率还提供了对大陆架和海湾地区的观测。可以构建基础温度的观测误差,以考虑基于最近的当地夜间时间的剩余日信号以及分析时间的年龄惩罚(Andreu-Burillo et al. 2009)。
18.5.3卫星测高
遥感卫星测高观测到广泛的动力过程,包括:潮汐、风浪、膨胀和空间异常。空间异常与背景中特定体积异常的垂直积分的高度变化有关。垂直相干比体积异常在海洋漩涡相对于周围的海洋状态,它们可能有相对温暖和/或新鲜的核心,导致正高度异常,或相对冷和/或咸的核心,导致负高度异常。对合并测高的分析显示,世界海洋50%的变化是由高度异常5-25厘米、直径100200公里的涡流造成的(Chelton et al. 2007)。大多数涡流的传播速度为2.5至12.5厘米/秒,向西传播±10°(Chelton等,2007年)。在地转湍流较为活跃的地区,如西部边界流附近,涡旋传播速度可瞬间超过40厘米/秒(Brassington 2010),并可发展高度异常超过25厘米,直径超过200公里(见图18.8)。
从卫星测高中恢复海面高度异常需要对大量修正进行精确估计(Chelton 2001)。例如,ssha可以通过以下公式从Jason1中恢复(Desai et al. 2003)。
Ssha = (range_ku + iono + dry + wet + ssb))
- (mss + setide + otide + pole + inbar) +偏置(18.1)
其中range_ku表示ku波段和电离层的距离延迟,dry, ssb表示电离层、干/湿对流层和海况偏差的距离修正。

图18.8 a 2010年1月1日Envisat、Jasonl和Jason2在澳大利亚地区的第98.55天测高通过的例子。b 2010年1月1日前后±2天的测高程覆盖了Ocean-MAPS中塔斯曼海相应的背景海平面异常。C与b相同,但±5天
图18.8 a 2010年1月1日Envisat、Jasonl和Jason2在澳大利亚地区的第98.55天测高通过的例子。b 2010年1月1日前后±2天的测高程覆盖了Ocean-MAPS中塔斯曼海相应的背景海平面异常。C与b相同,但±5天
mss、setide、otide、pole和invbar是指平均海面、固体固体潮、海洋和负荷潮、极点潮和气压计逆响应的地球物理效应。偏差是由轨道校准产生的修正项。平均海面或大地水准面由数年重复轨道轨道的时间平均值估计,精度为1公里。正是由于这个原因,Jason1和Jason2到TOPEX-Poseidon的重复任务被放入相同的轨道(Robinson 2006)。海洋潮汐谐波是已知的,可以用逆方法进行高精度估计(Le Provost 2001)。TOPEX-Poseidon、Jason级任务的误差为3厘米,ERS、Envisat和Sentinel任务的误差为6厘米,GFO为10厘米(Robinson 2006)。通过合并Jason级任务和ERS任务可以实现的精度为5厘米(Ducet et al. 2000)。来自中国的HY-2系列的未来测高任务,来自印度财团的ka波段高度计(Altika)的SARAL和Cryosat目前仍有未知的错误,但能够通过对Jason系列的校准获得改进的错误。
迄今为止发射的所有高度计都是观测最低点的仪器。这些任务所解决的空间和时间尺度由卫星轨道所提供的空间和时间覆盖范围决定。对于许多修正来说,使用非太阳同步重复轨道模式是至关重要的。所使用的重复极轨道是重复轨道之间的周期、相邻通道之间的赤道间隔和纬度范围(倾角)之间的权衡。杰森系列的重复轨道为9.92天,通过间隔为
156.6公里(254通/周),纬度范围±66.15°。ERS/Envisat/ Sentinel系列使用逆行太阳同步重复轨道周期为35天,经过间隔为79.9公里(501次/周期),纬度范围为±81.45°(倾角98.55°)。
多颗卫星任务的组合对于提供更好的时间和空间覆盖以支持SLA分析和业务海洋预报至关重要(Ducet et al. 2000;Pascual et al. 2009)。目前,我们有Jason1和Ja-son2在串联轨道上,Envisat提供了接近实时的产品。图18.8a显示了这三个特派团在澳大利亚区域获得的一天通行证(2010年1月1日)的示例。与海洋预测中使用的误差协方差的空间尺度相比,每天的覆盖范围是稀疏的,其尺度为漩涡级,100公里(Oke et al. 2005, 2008;Martin et al. 2007;Brasseur et al. 2005;卡明斯2005)。为了增加空间覆盖,提高最小二乘分析的质量,所有操作系统都采用了较大的观测窗口。图18.8b, c显示了覆盖范围的例子,5天窗口和11天窗口叠加在来自OceanMAPS系统的塔斯曼海SLA背景上。5天窗口显示了覆盖范围的差距,这些差距与海洋漩涡的空间尺度相当或更大。 An 11 day window provides full coverage from Jason1 and Jason2 and partial coverage from Envisat and offers spatial coverage that is comparable to the scales of the ocean eddies (see Fig. 18.8c).
澳大利亚区域的平均测高覆盖范围为1°x 1°箱,可用于近实时的单个和多个任务(见图18.9)。沿轨观测已通过细化到每50公里约1次观测的采样率进行归一化,这对应于Jason1和Jason2的跳跃8(即8 x 5.78 km ~ 46 km)和Envisat的跳跃6(即6 x 7.53 km ~ 45 km)。变薄可以解释为可能被用于构建所谓的超级观测的尺度(例如,Lorenc 1981;Purser et al. 2000)。这是一种形式化的方法,用于压缩观测数据,以减少原始观测数据相对于目标尺度的冗余,在这种情况下,目标尺度被选择为1°x 1°箱。在实践中,Super-obs具有许多有益的性质,包括:增加覆盖的同质性,减少观测空间(即计算成本),改善分析中矩阵反演的条件(见Daley 1991, p. 111)。雷竞技csgo
多卫星任务获得的平均覆盖范围是前面描述的轨道特性的函数。在实践中,覆盖范围还受到通信故障和卫星机动或设备故障转移时期的影响。这在Envisat的覆盖范围(见图18.9b)中很明显,它受到2009年11月12日至27日(大约半个重复轨道周期)维护期间卫星通道丢失的影响。Jason1、Jason2和Envisat(见图18.9d)在公海上获得的平均覆盖范围在0.2 ~ 0.7个观测值/ 1°× 1°bin / day之间,平均覆盖范围约为0.44。在所有情况下,沿海地区的覆盖范围都减少了,这是由于观测的质量控制和1°x 1°bin(即海水)的比例所影响的。Jason1的平均覆盖率(见图18.9a)不超过~0.45。的
-

- 图18.9从Jasonl获得的2009年1月1日至2010年3月1日每天每1°x 1°仓的平均SLA观测值。萨特。c Jasonl和Jason2 d Jasonl和Jason2和ENVISAT。沿轨观测已归一化为~1个观测/50公里

Jasoni和Jason2的串联任务(图18.9c)显示,与Jason1相比,覆盖的空间分布整体有所改善。
图18.9a-d对应的SLA观测覆盖归一化频率分布如图18.10所示。由于Jason1的轨道采样比较粗,所以1°* 1°bins的23%根本没有被采样。随着串联任务Jason1和Jason2的引入,未被采样的1°* 1°箱的数量下降到~8%。Envisat任务几乎对所有的垃圾桶进行了采样。各分布曲线的模态为(0.15;0.2;0.35;0.5)奥林匹克广播服务公司。以Envisat为例,每天每箱;Jason1(忽略零峰); Jason1 and Jason2; Jason1, Jason2 and Envisat respectively. The number of obs. per day for all bins never exceed 0.73 for the three altimeters. The distribution shows that 50% of bins in the Australian region have a coverage of better than (0.15; 0.15; 0.3; 0.45) obs. per bin per day for Envisat; Jason1; Jason1 and Jason2; Jason1, Jason2 and Envisat respectively.
根据卫星的不同,处理海平面异常产品的模式有两到三种,质量和及时性各不相同。质量是由质量决定的
测高观测的频率分布
测高观测的频率分布
-

- 图18.10澳大利亚地区和图18.9所示卫星组合的每天每1°x 1°bin测高观测的归一化频率分布

地球物理数据记录(GDR)的估计质量以及其他修正术语的精度。精确的轨道位置是在实时(例如,60天)后一段时间确定的,并且只与倒推法.临时GDR (IGDR)目标是更快的轨道确定,精度较低,但可以在2-3天内交付(Jason系列)和3-5天内交付(Envisat)。对于Jason系列额外的机载卫星仪器,允许在24小时内实时交付操作GDR (OGDR)产品。由于Ja-son-1上的仪器故障,OGDR不可用,但已在AVISO服务器上恢复。随着Jason-2的推出,该产品现在也可以使用。有关卫星测高活动的摘要可从AVISO (http://www.aviso.oceanobs.com/no_cache/en/data/operational-news/index.html).综上所述,Jason1和Jason2 IGDR产品的完整轨道在实时后3 - 12天可用,Envisat IGDR产品的完整轨道在实时后5 - 40天可用,Jason2 OGDR产品的完整轨道在实时后1-10天可用。由于IGDR和OGDR产品的质量下降以及产品的时效性,已确定四个实时高度计的分析性能相当于两个延迟模式高度计(Pascual等人,2009年)。
18.6实时强制系统
海洋是一个强迫耗散系统,其中的强迫主要是通过空气-海洋界面的质量、热量和动量的通量。大气通量可从成熟的运行数值天气预报系统获得,这些系统提供可靠和一致的性能。然而,由于直接观测通量有限和边界条件存在误差,大气通量的表现相对于状态变量较低。表18.5总结了影响海洋预报大气通量产品选择和通量参数化的特性。
海洋的惯性相对较大,热惰性与大气相比,在短时间尺度上,海气通量对表面海洋状态的扰动相对较小,并随深度而衰减。即使在热带气旋等极端条件下,也观察到冷尾流的表面温度在1°C至6°C之间(Price 1981年),而且温度变化的主要原因是海水团受动量通量的影响而夹带和混合,而不是表面热通量造成的变化。大气风局部的动量通量大部分转移到从源区辐射出来的引力波中。强风的局部动量转移通过朗缪尔环流(McWilliams et al. 1997)、波浪破碎(Melville 1996)和持续的波浪消散发生风事件是波龄的函数(derennan et al. 2003)。在远离风的地方,很大一部分能量通过小尺度的湍流和地形相互作用辐射出去并消散。
在沿海地区,海水体积的减少对大气通量更敏感。风暴潮和沿海截留波(例如,沿海开尔文波)是进入海岸的水平质量通量对施加的风应力和较低大气压的埃克曼响应的结果(见图18.3h, i)。海岸上涌更密集、通常较冷和营养的水团是对施加的相反方向风应力远离海岸的质量通量的响应(见图18.3h, i)
实时地表通量 |
健壮的、定义良好的和一致的性能 |
预测系统的周期、分辨率和区域 |
|
全球、区域、次区域 |
|
预测能力曲线 |
|
边界条件,持续海温,表面粗糙度 |
|
Land-sea-ice面具 |
|
大气边界层、云和辐射物理学 |
|
观测约束(如散射测量) |
|
追算通量 |
数据同化期间的性能 |
通量参数化 |
固定边界条件通量积 |
用海洋边界条件动态预报大气状态 |
|
空气-海或空气-波-海耦合 |
|
海洋动力学 |
海洋状态对表面通量的敏感性 |
海洋预报误差对地表通量误差的敏感性 |
图18.3a, b).沿海地区由于深度减少,热容也较小,对日变暖更敏感。海岸也是大气降水在陆地盆地上聚集的区域,可以作为密度较低的淡水羽流从河口排出。所有这些过程都具有与大气天气相当的时间尺度,并可对海洋状态和沿海地区的环流产生可观测到的变化。因此,沿海海洋状态预报的技巧对大气通量的技巧很敏感。
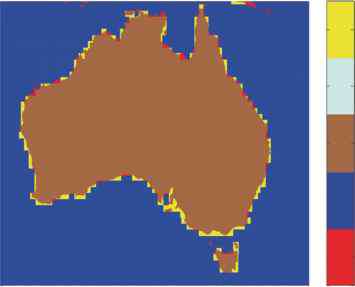
海洋预报系统的大气通量是从实际的数值天气预报系统(例如,GASP;Seaman et al. 1995)。NWP的典型配置是每6小时进行一次分析,每12小时进行一次预测。在海洋后延过程中,24小时的分析通量可以由4个6小时的分析组成。地表通量的一般平均周期为3小时和6小时。大气预报通常由一套全球和多层嵌套区域预报系统组成。一般来说,大气模式的水平分辨率比可比的海洋模式粗,需要考虑。不同分辨率的模型之间的关键差异之一是海陆掩模的不匹配。GASP(0.75°)与海洋预报澳大利亚模式(OFAM;Schiller et al. 2008)(0.1°)如图18.11所示。有一些特定的区域显示了一些区域对应于New Land(源中的Sea mask和目标中的Land)或New Sea。
OFAM掩码与GASP掩码的差异
OFAM掩码与GASP掩码的差异
浮冰120E 130E 140E 150E 160E 110E 120E 130E 140E经度150E
图18.11 GASP (Seaman et al.)和OFAM (Schiller et al.)的陆海掩模比较。陆地(棕色)、海洋(蓝色)、GASP陆地/OFAM海洋(黄色)和GASP海洋/OFAM陆地(红色)这四种组合忽略了澳大利亚地区浮冰120E 130E 140E 150E 160E 110E 120E 130E 140E 150E经度
图18.11 GASP (Seaman et al.)和OFAM (Schiller et al.)的陆海掩模比较。陆地(棕色)、海洋(蓝色)、GASP陆地/OFAM海洋(黄色)和GASP海洋/OFAM陆地(红色)这四种组合忽略了澳大利亚地区的冰罩
一般来说,陆地-海洋边界的大气通量的大小是不连续的,这主要是由于表面粗糙度、反照率和热容的变化。不连续性的大小随每个变量和一天中的时间而变化。由于沿海海洋状态对大气通量很敏感,因此需要明确消除陆地上的通量。将通量替换为新海位置通常是用海面上通量的边界条件进行拉普拉斯运算,因为这在计算上是廉价的。这种方法没有先验地保留风或其他属性与海岸线的对齐。有许多软件包执行包括许多地球系统耦合器(例如,OASIS, Redler等,2010年),但重要的是测试这些方案,而不是假设它们将满足要求。重划的一个重要性质是保留从源网格到目标网格的场的总积分。OASIS耦合器实现了球面坐标重新映射和插值包(SCRIP;Jones 1999)作为一个令人尊敬的选择。另一种简单的方法是使用一个积分变量,其中控制体积积分Eq. 18.a被求和,形成离散积分变量Eq. 18.b, (Leonard 1995),它在每个单元界面上是精确的,并且隐式地保持源网格上的通量。
f, = (0 - J =0 (18.b))
将原始单元体积考虑到更精细的网格分辨率,在约束条件IAx=KAX的情况下,指数为k e [1, k]的AX,通过对积分变量插值构造等效积分变量为:
^ = I 0 k =0 (18.2a)
继续阅读:海洋动力学观测系统与预报研究中海岸模式与观测的整合
这篇文章有用吗?
