遥感测量和限制可见光和红外图像
成像仪是星载云和气溶胶检索的“主力”传感器,因为它们以高空间分辨率提供高全球覆盖的观测数据。这两种不同的算法是基于(a)可见光的反射(只在白天)和(b)可见光的发射热红外云顶辐射(白天和黑夜)。操作检索是基于查找表,查找表是根据给定几何形状的辐射传输模型和一组参数创建的,如光学厚度、有效半径、云顶压力和热力学相位。将测量的反射(发射)辐射度与查找表值进行比较,并根据最接近测量值的建模值分配相应的云参数。基于辐射的检索依赖于地表和(较冷的)云层之间的温度对比。因此,它们能够探测到基于反射的检索失败的高空薄卷云(甚至是不可见的)。这些反演中的系统误差来自于垂直和水平空间云的可变性。一个例子是反照率偏差:由于光学厚度和云的反照率,与均匀云具有相同平均光学厚度的非均匀云始终具有低反照率其光学厚度比均匀的光学厚度要小,这导致了对其光学厚度的低估。有效半径检索也变得不可靠,特别是对于破碎的云。从图像得到的云量在很大程度上取决于仪器的空间分辨率(从几米到20公里不等)和检索对各种类型云的敏感性,以及云的光学厚度。云的垂直结构不能被低空观测成像仪分辨;多层云代表了一个问题,特别是如果最上面的一层部分是透明的。冰云特别难以成像,不仅因为它们可能非常薄和不均匀,而且还因为冰晶形状;目前,利用多角度(McFarlane et al. 2005)或偏振(Sun et al. 2006)观测的技术正在探索中。
“经典的”AVHRR在各种平台上用于云和气溶胶的回收,并且仍然在地球静止平台上飞行。自1978年首次部署以来,成像仪的空间和光谱分辨率都有所提高:由NASA的极地轨道太阳同步卫星Terra和Aqua运行的MODIS提供了1公里空间分辨率的云检索。Aqua是所谓的“a - train”的一部分,这是一个由各种平台组成的卫星星座,每天下午都有一个立交桥。MISR (Kahn et al. 2005)是专门设计用于通过Terra上不同视角的相机组合来改善气溶胶和云的检索。POLDER (Riedi et al. 2001)利用偏振反射的信息进行云相位识别、晶体形状检测和气溶胶检索。在过去的十年中,这三个平台的气溶胶反演取得了重大进展,特别是在明亮的陆地表面。然而,它们目前只能在完全无云的条件下才能实现。
而标准成像仪依赖于有限数量的波长波段的信息,光谱成像仪允许新颖的检索技术。在热窗中,AIRS提供了水蒸气、二氧化碳和温度的垂直剖面。在太阳光谱范围内,气溶胶-云联合反演的光谱成像能力或气候变化归因于各种raybet雷竞技最新迫使代理正在探索中。
雷达
雷达(无线电探测和测距)依赖于云滴和降水对微波辐射的散射。后向散射信号的强度取决于雷达和水滴之间的距离、水滴大小分布以及发射脉冲的波长。在Mie散射理论的瑞利极限中,它与1-4和(D6)成正比。因此,对小云滴的灵敏度只能通过使用较短的波长来实现。然而,在短的波长时,在无线电窗口边缘(1 = 1cm)附近,由于散射和吸收增加,信号迅速衰减。因此,波长的选择取决于目标:天气雷达(5-10厘米波长)穿透非降水云,而云雷达(1厘米)对较小尺寸的云滴敏感,但范围较短。大多数天气雷达是扫描和极化系统,在脉冲模式下工作。到云的距离由脉冲往返的时间决定,其中最大距离由脉冲间隔决定。此外,多普勒雷达确定相对于雷达系统的水成物的速度和方向。可探测速度的范围与脉冲分离时间成反比。信号偏振被用来检测垂直和水平维度,从而检测散射物体的形状。雷达既用于探测冰云,也用于探测水。它们擅长探测云结构,而当与其他仪器的数据结合时,对冰和液态水含量剖面的检索得到了更好的约束。
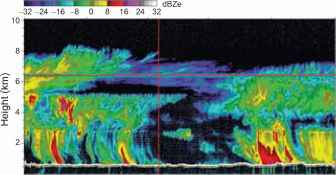
雷达系统最常部署在地面。第一个星载雷达云系统是TRMM卫星上的降水雷达(f = 13.8 GHz, 1 ~ 2 cm)。最近(2006年),云剖面雷达(CPR;f = 94 GHz, 1 ~ 3毫米)在CloudSat上发射(Stephens et al. 2002)。频率、峰值功率和动态范围的选择是为了协调对小云滴的足够敏感性和对中等厚度云的剖面能力。图4.8显示了2006年11月9日的CloudSat图像,当时加拿大Convair 580正在加拿大CloudSat/CALIPSO验证项目中飞行。卫星雷达(w波段)和飞机雷达(ka波段)之间的比较显示出由于波长和分辨率的一些重大差异。然而,总的来说,CloudSat雷达在描述云层和探测轻微降水方面做得很好,而且它的覆盖范围比其他方法大得多。图4.9显示了飞机和卫星观测同一云时的PMS 2-DC冰晶图像。这些图表说明了一个要点,即带有远程和原位传感器的原位飞机对于测试和验证卫星仪器非常有用。
激光雷达和Ceilometer
激光雷达(光探测和测距)类似于雷达,但工作于可见光和近红外光脉冲。由于波长比微波辐射短得多,后向散射信号对气溶胶颗粒(典型尺寸为0.1-1 pm,与降水尺寸为0.1-1 mm的颗粒相比)很敏感光学穿透深度相对较低(r ~ 3…4)。激光雷达回波由气溶胶和分子消光剖面以一种非平凡的方式确定。高光谱
云卫星w波段雷达
云卫星w波段雷达

18:04:25z 18:04:25z 18:04:25z 18:04:25z 18:04:25z 18:04:25z
时间(UTC)
18:04:25z 18:04:25z 18:04:25z 18:04:25z 18:04:25z 18:04:25z
时间(UTC)
加拿大康维尔ka波段雷达
加拿大康维尔ka波段雷达
47.04 47.20 47.36 47.51 47.67 47.83
Latidude(度)
17:58:39z 18:01:19z 18:03:59z 18:06:39z 18:09:19z 18:11:58z
时间(UTC)
47.04 47.20 47.36 47.51 47.67 47.83
Latidude(度)
17:58:39z 18:01:19z 18:03:59z 18:06:39z 18:09:19z 18:11:58z
时间(UTC)
图4.8顶部:2006年11月9日的CloudSat雷达图像(w波段),当时在指定的纬度和时间经过安大略省南部。横过图像的水平线显示了当时加拿大康维尔580的飞行高度;垂直线显示了估计两个平台重合的位置。十字路口附近的明亮像素很可能是飞机本身的反射。下图:来自飞机的ka波段雷达数据,图像相互匹配对应。康维尔号沿着与卫星相同的路径飞行,但显然速度较慢。Convair雷达数据的分辨率较高,但它与CloudSat图像的主要特征相匹配。(图片由加拿大环境部的戴夫·胡达克和彼得·罗德里格斯选择和制作。)
分辨率激光雷达(HSRL)通过检测分子热运动引起的返回信号的多普勒拓宽来分离分子和气溶胶的贡献(Shipley et al. 1983)。拉曼激光雷达(Ansmann et al. 1990)利用光的非弹性分子散射独立地确定大气气体浓度和气溶胶消光分布。的
^i'lh i utikllrrr l, r i。<**»i i **, i * tit i. i i u.« |
我 |
|
.ri rl作为l*;即时通讯 |
l u (- l w l r l r i-1 r li iW i fc 5 i■i w i i i i■ |
|
1 u 1 |
障碍物我* r |
||
倪'LLfi份子。Lr ^射频 |
福~ |
' l rr Pii l |
|
OAP-2DC 18:04:37.20 |
ULPrir |
||
MfcTiri»LLrr > r r
ki |
rrk * MTtu |
|||||
r |
国际扶轮* |
ui *迷雾之岛。 |
||||
图4.9云卫星雷达对Convair 580进行成像时拍摄的PMS 2-DC图像。竖条代表800 ^m。观察到的冰晶形状有些不规则。(图片由加拿大环境部的Alexei Korolev制作。)
图4.9云卫星雷达对Convair 580进行成像时拍摄的PMS 2-DC图像。竖条代表800 ^m。观察到的冰晶形状有些不规则。(图片由加拿大环境部的Alexei Korolev制作。)
激光雷达回波的去极化提供了散射体形状的信息。激光云顶计是一种简单的激光雷达,云底定义在后向散射信号增加超过一定阈值的高度。这个阈值可能会对云下的高气溶胶光学厚度给出错误的云底读数。光学云顶计是利用扫描光源和水平分离的光电管,测量云底的反射率,从几何上确定云底。
2006年,CALIOP (Winker et al. 2007)与CloudSat和Aqua密切合作,被添加到NASA的CALIPSO上的A-Train。它提供了气溶胶和薄云的垂直剖面。
微波辐射计
被动微波辐射计探测地球自然发射的辐射云和降水地表降水与LWP和降水速率有关。LWC剖面可以与雷达一起推导。在进行反演时,必须考虑大气的湿度和温度剖面以及地表特性。与LWP相关的误差可高达25 g m-2 (thin的典型值)水的云范围从10-100 g m-2)。通过使用双频辐射计(例如,Liljegren等,2001年),可大大降低归因于大气廓线的不确定性。它们的工作频率为10-30千兆赫,其中信号主要由降水和大气决定,云层几乎是透明的。频率越高,信号衰减越明显云和水蒸汽。高频通道的加入使得在降水存在的情况下能够检索云的LWP,增加了对低LWP云的敏感性,并改善了对大气廓线的检索(Di Michele和Bauer 2006)。特别是水蒸气和温度可以检索云内的概要文件。
继续阅读:低空云的降水
这篇文章有用吗?